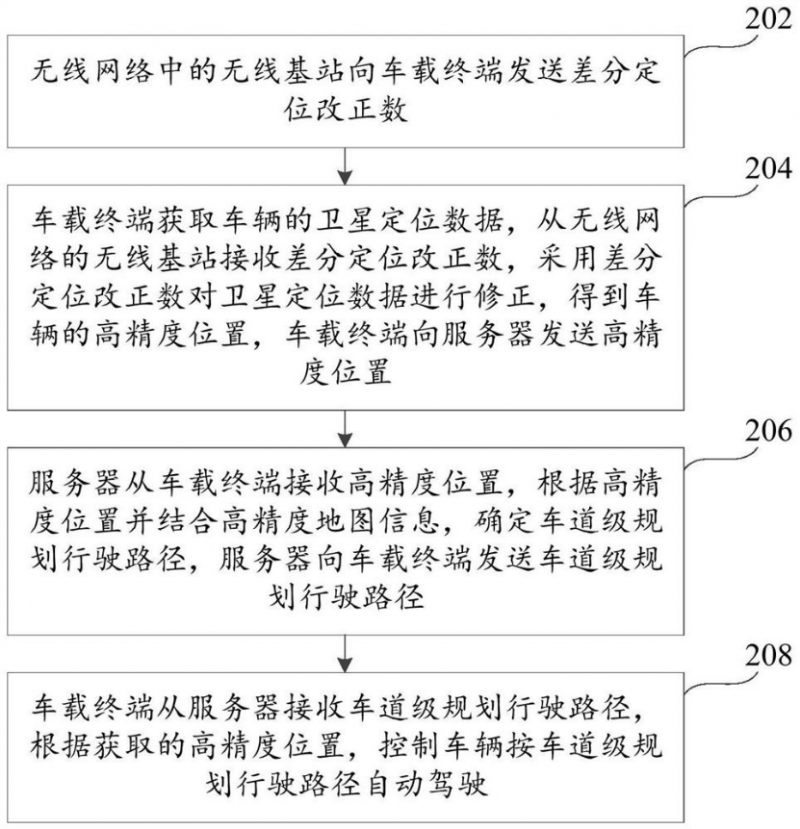
近日,華為新增多項(xiàng)專利信息,其中包括“自動(dòng)駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”專利,該專利已獲授權(quán)。

為了解決現(xiàn)有技術(shù)無(wú)法實(shí)現(xiàn)全天候的定位與導(dǎo)航,且3D高精度地圖難以有效適應(yīng)環(huán)境變化而影響到定位精度的問題,本發(fā)明實(shí)施例提供了一種自動(dòng)駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器。